스위스 EPFL(Ecole Polytechnique Fédérale de Lausanne)의 엔지니어들은 "손"의 개념을 다시 생각했을 때 가장 기본적인 설정 중 하나인 손이 팔에 고정되어야 한다는 점을 의도적으로 포기했습니다. 그들은 로봇 팔에서 분리되고, 작은 생물처럼 표면을 기어 다니고, 거의 모든 방향에서 물체에 접근하여 잡을 수 있는 로봇 손을 개발하여 미래의 산업 검사 및 유지 관리 작업을 위한 새로운 작동 도구를 제공했습니다.
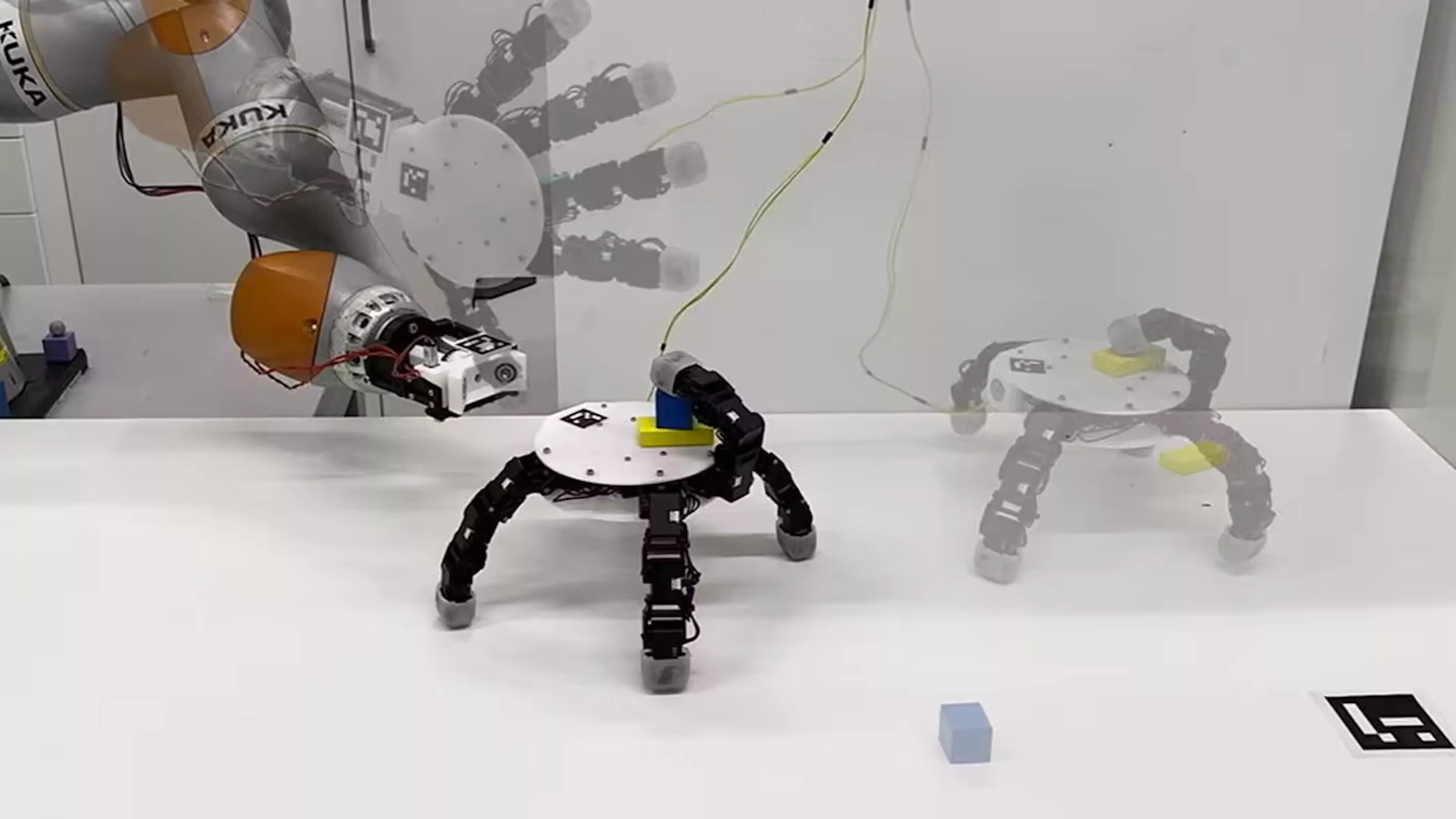
로봇 팔 끝에 고정되는 기존 조작기와 달리 이 새로운 장치는 "이중 모드" 조작기입니다. 일반 엔드 이펙터로 사용하거나 로봇 팔에서 잠금을 해제한 후 독립적으로 이동할 수 있습니다. 일단 분리되면 손가락 사이의 조화로운 움직임에 의존하여 다양한 방향으로 기어가고, 회전하고 위치를 변경하여 대상 물체에 적극적으로 접근합니다. 이 디자인은 '팔다리'와 '이동 기계' 사이의 경계를 어느 정도 모호하게 만들고 있으며, 연구팀은 공상 과학 개념이 아닌 로봇 형태의 실용적인 진화로 간주하고 있습니다.
이 프로젝트는 EPFL에서 연구를 수행했으며 현재 우한 대학교에 있는 Gao Xiao가 주도하고 있습니다. 그는 Financial Times에 팀의 목표는 생물학적이든 기계적이든 "손"이 운영 작업에서 할 수 있는 범위를 확장하는 것이라고 말했습니다. 엄지손가락 하나로 나머지 손가락을 반대하는 인간의 손과 달리, 이 로봇 손의 각 손가락은 다른 손가락과 반대 관계를 형성할 수 있습니다. 이 카운터 핑거 구조는 인간의 손보다 시스템에 훨씬 더 많은 유연성을 제공하므로 다양한 손가락 조합 사이를 전환하여 집기, 클램핑 또는 들어올리기와 같은 다양한 방법으로 대상을 정밀하게 조작할 수 있습니다.
구조적 혁신 측면에서도 이 손은 인간의 손에는 없는 '앞뒤 양방향 잡기' 능력도 갖췄다. 인간의 손가락은 생리학적으로 손바닥 등쪽 방향에서 물체를 효과적으로 잡을 수 없지만, 이 시스템은 앞뒤 방향 모두에서 안정적으로 물체를 잡을 수 있습니다. 이를 통해 동시에 여러 물체를 잡을 수 있을 뿐만 아니라 도구와 대상을 조작할 때 "동일한 멀티 태스킹"을 위한 여지도 열립니다.
실험 시연에서 이 로봇 손은 병 본체를 고정하는 동안 병 뚜껑을 풀거나 작업물을 안정화하는 동안 다른 도구로 토크를 가하는 등 일반적으로 두 사람의 손의 협력이 필요한 여러 작업 작업을 완료했습니다. 서로 다른 손가락의 반대 조합을 유연하게 예약함으로써 기존의 양손 공동 작업 시나리오에서 일부 작동 모드를 시뮬레이션하거나 능가할 수도 있습니다.
Gao Xiao는 팀의 디자인 출발점이 스텔스나 감시 목적이 아닌 '기능 제어'에 있었다고 강조했습니다. 연구원들은 가장 잠재적인 응용 시나리오가 파이프라인이나 장비 내부의 상태 검사, 유지 관리 부품의 분해 및 조립, 좁은 공간에 떨어진 공작물 회수 등 업계 최전선에 있다고 믿습니다. 이러한 응용 분야에서는 기존의 완전한 로봇 팔이나 인간 조작자가 현장에 침투할 수 없는 경우가 많지만, 작고 독립적으로 움직이는 "크롤링 손"은 접근하기 어려운 위치에 접근하여 작동할 수 있습니다.
연구팀은 미래의 로봇 시스템이 모바일 플랫폼과 분리 가능한 로봇 손을 결합할 수 있을 것으로 예상하고 있습니다. 모바일 플랫폼은 복잡한 현장의 장비 점검 및 접근을 담당하고, 로봇 손은 필요 시 플랫폼이나 로봇팔에서 분리돼 좁은 공간 깊숙이 들어가 잔해 청소, 밸브 작동, 장비 집는 등의 작업을 수행한다. 이러한 분업과 협업 구조는 복잡한 환경에서 산업 자동화 시스템의 적응성과 작업 완료율을 향상시킬 것으로 기대됩니다.
이 작품은 로봇계에서도 주목을 받았다. 옥스퍼드 대학교 로봇 공학 연구소 부교수인 Digby Chappell은 이 로봇 손이 "흥미롭고 도발적"이며 산업 자동화 및 보철 연구와 같은 분야에서 계몽적인 중요성을 가지고 있다고 말했습니다. 그는 프로토타입의 크롤링 속도가 현재 그다지 빠르지는 않지만 "움직임과 잡기" 사이의 시너지 효과를 달성하는 능력이 이미 "로봇 손"의 가능한 형태를 재정의하고 있다고 지적했습니다.
현재 이 "기어가는 손"은 아직 실험실 프로토타입 단계에 있습니다. 그러나 이는 인체 해부학을 모방하는 것과는 완전히 다른 길을 분명히 보여주었습니다. 로봇 공학의 다음 단계는 더 이상 "인간과 같은" 것에 국한되지 않고 산업 및 실제 요구 사항을 중심으로 보다 적응 가능하고 다목적이며 모듈식 방향으로 진화할 것입니다.