세계에서 가장 진보된 곤충초소형비행체(MAV)를 만들어도 안정적으로 착륙하지 못하면 결국 쓸모가 없게 된다. 이것이 바로 하버드 대학의 과학자들이 관절이 완비된 한 쌍의 긴 모기 같은 다리를 갖춘 RoboBee를 설계한 이유입니다.
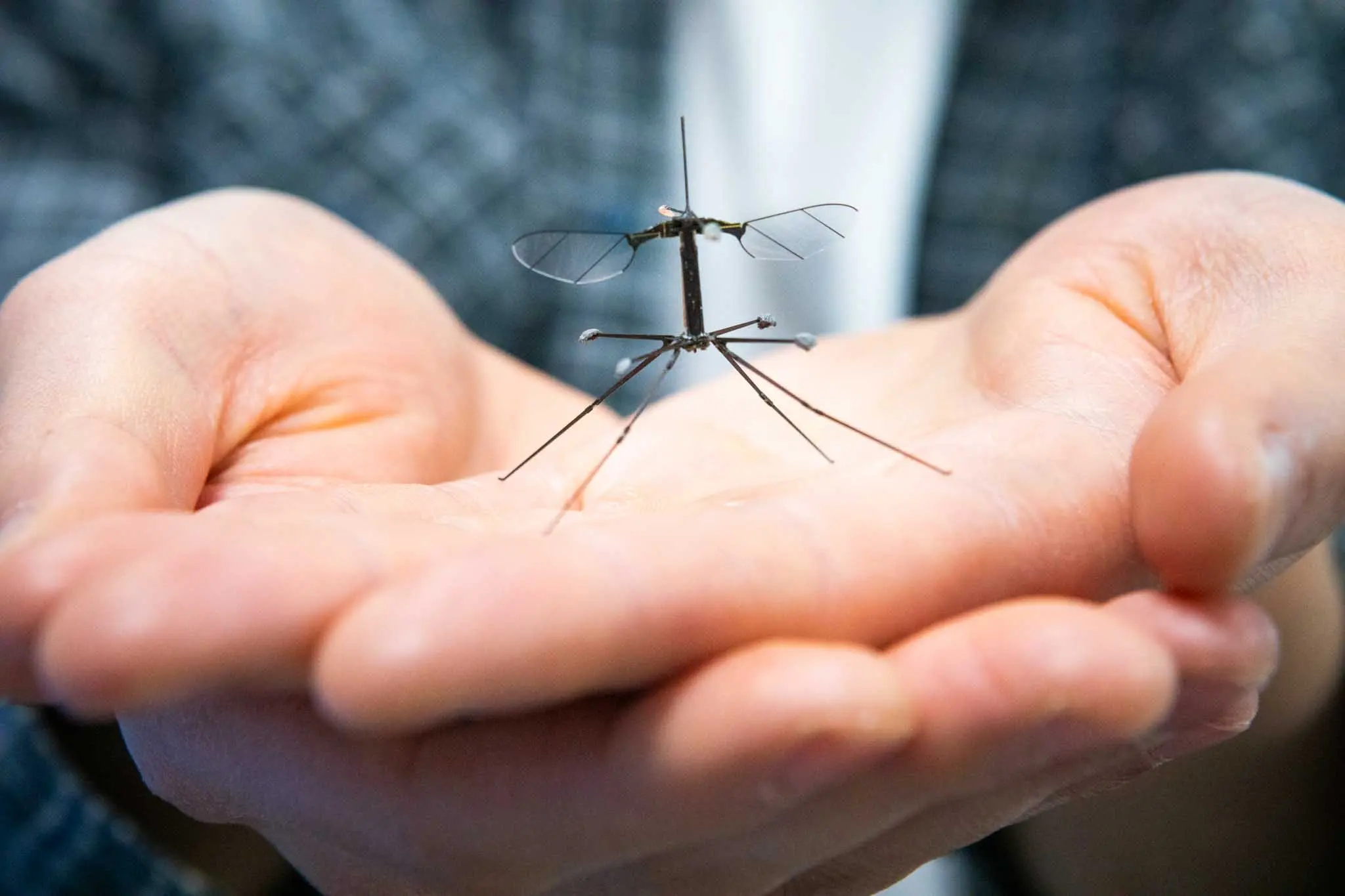
RoboBee에는 모기를 모방한 다리가 있습니다. 향후 버전은 수색 및 구조 작업이나 작물 수분에 사용될 수 있습니다.
RoboBee에 대해 잘 모르시는 분들을 위해 설명하자면, 인공 근육이 장착된 한 쌍의 작은 날개를 퍼덕여 날아다니는 꿀벌에서 영감을 받은 로봇입니다. 날개 길이는 3cm(1.2인치) 미만이고 무게는 10분의 1그램에 불과합니다. 하지만 전선을 통해 전원과 마이크로프로세서에 연결되어 있습니다. 즉, 향후 버전은 결국 완전히 독립적으로 실행될 수 있습니다. 실제로 태양광 버전은 이미 존재합니다.
이 작은 로봇의 다른 버전은 수중 비행 및 매달린 정지와 같은 기동 능력이 입증된 반면, 기본 모델은 평평한 표면(또는 기타) 표면에 제대로 착륙한 적이 없습니다. 펄럭이는 날개에 의해 생성된 소용돌이가 지면에 묶여 있을 때 공기 난류를 일으켜 로봇이 균형을 잃을 수 있기 때문입니다.
로봇의 기계적 재설계를 주도하고 있는 공과 대학원생 Christian Chan은 "이전에는 착륙할 경우 차량을 지면에서 조금 더 멀리 떨어뜨리고 수직으로 안전하게 착륙하도록 기도했습니다."라고 말했습니다.

모기는 부드럽게 착지하는 능력으로 잘 알려져 있습니다.
모기 다리에서 영감을 받은 RoboBee의 새로운 다리 4개는 로봇의 몸이 지면 효과 난류의 영향을 받기 전에 안전하게 지면에 닿을 수 있을 만큼 길고 유연합니다.
또한, 새로운 제어 알고리즘은 로봇이 "단순히 떨어지도록" 두는 것이 아니라 보다 원활하게 착륙하도록 안내합니다.

새로운 다리를 사용하여 한 잎에서 이륙하고 다른 잎에 착지하는 RoboBee의 다중 노출
박사후 연구원이자 연구 논문의 공동 저자인 Alyssa Hernandez는 “다양한 곤충 중에서 생물학적 영감을 찾는 것은 로봇을 지속적으로 개선할 수 있는 수많은 방법을 제공합니다.”라고 말했습니다. "결과적으로 우리는 이러한 로봇 플랫폼을 생물학 연구 도구로 사용하여 생체 역학적 가설을 테스트하는 연구를 수행할 수 있습니다."
이 논문은 최근 사이언스 로보틱스(Science Robotics) 저널에 게재되었습니다. 아래 비디오에서 RoboBee가 크레인 파리의 착륙 동작을 모방하는 것을 볼 수 있습니다.
출처: Harvard John A. Paulson School of Engineering and Applied Sciences