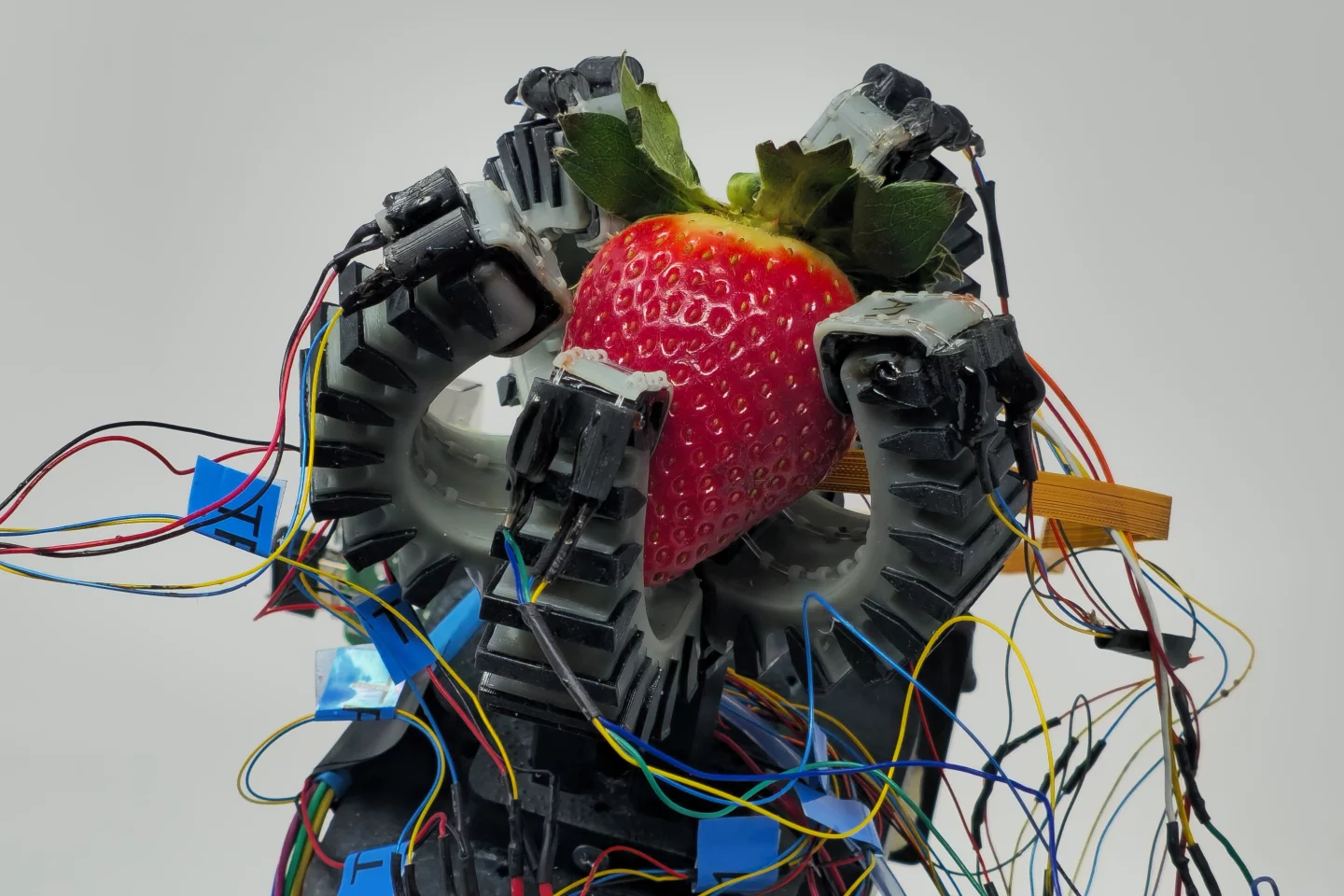
최근 미국 웨스트버지니아대 연구팀은 딸기 등 깨지기 쉬운 과일과 채소를 부드럽게 따낼 수 있을 뿐만 아니라 따는 과정에서 촉각과 시각을 통해 익은 정도를 종합적으로 판단할 수 있는 부드럽지만 강력한 소프트 로봇 핸드를 개발해 따는 과정에서 인건비와 폐기물 발생률을 획기적으로 줄일 수 있을 것으로 기대된다.
보고서에 따르면 농업은 로봇 기술의 영향을 점점 더 많이 받는 산업 중 하나가 되고 있습니다. 전 세계 많은 지역의 농민들은 노동력 부족과 인건비 상승이라는 이중 압력에 직면해 있습니다. 일부 작물의 경우 수동 수확 비용이 전체 생산 비용의 절반에 가깝습니다. 딸기, 라즈베리, 아보카도와 같이 수확 기간이 매우 짧고 멍이 들기 쉬운 과일과 채소의 경우 전통적인 수동 또는 견고한 기계 수확으로는 효율성과 손실의 균형을 맞추는 것이 어려운 경우가 많습니다. 결과적으로 농부들은 수확량의 최대 4분의 1까지 손실을 입을 수 있습니다.
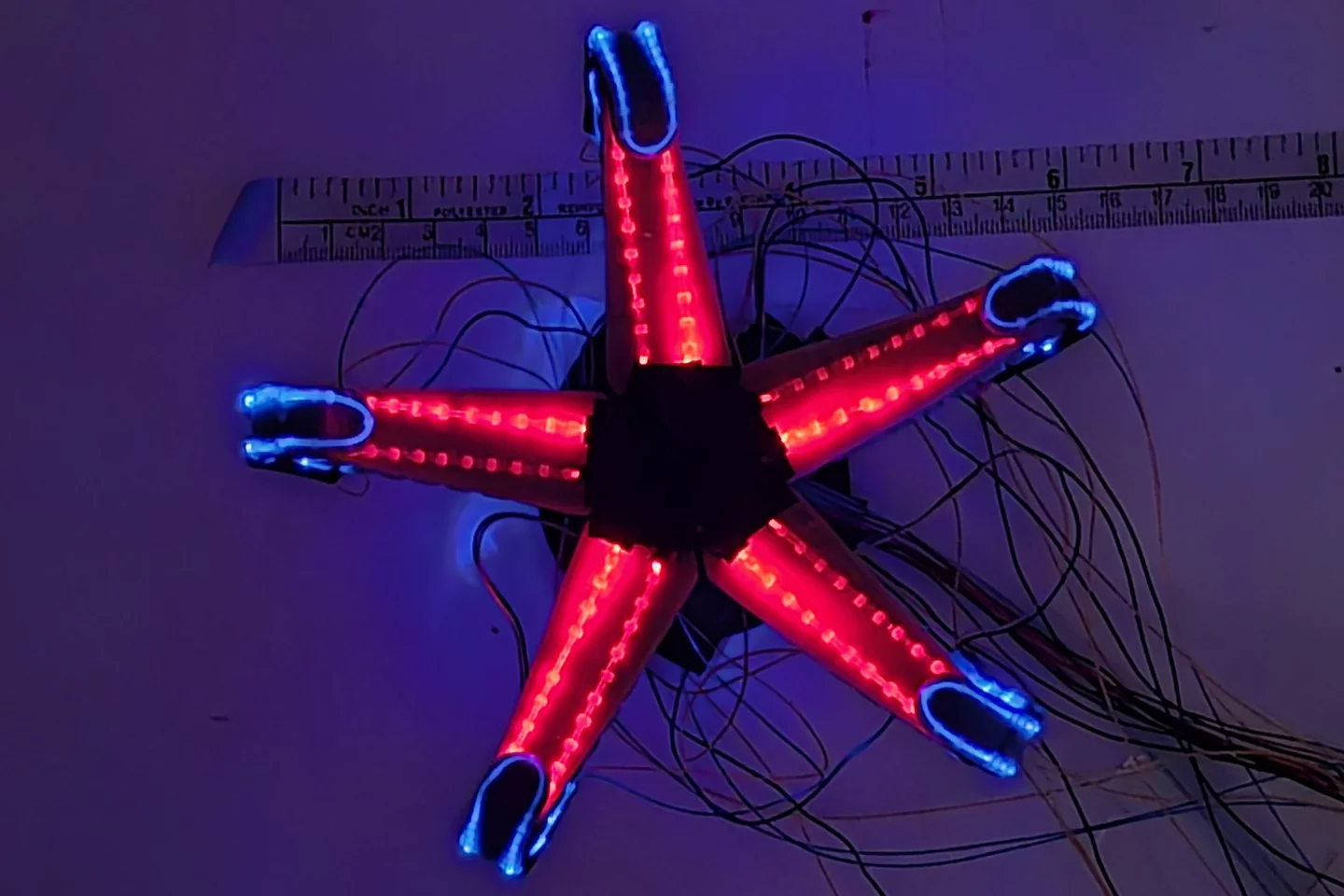
웨스트버지니아대학교 '로바이오틱스 연구소'팀은 동물의 움직임을 모방하는 로봇 개발에 힘써왔다. 이번에 출시된 부드러운 로봇 손은 사람들이 생각하는 금속 '기계 발톱'이 아니다. 대신 불가사리의 해부학적 구조에서 영감을 얻어 실리콘과 폴리우레탄 소재를 사용해 부드러운 손가락을 만들었다. 동시에 전체적인 모양은 인간의 손과 유사한 다섯 손가락 레이아웃을 유지하므로 과일을 더 자연스럽게 집고 잡을 수 있습니다.
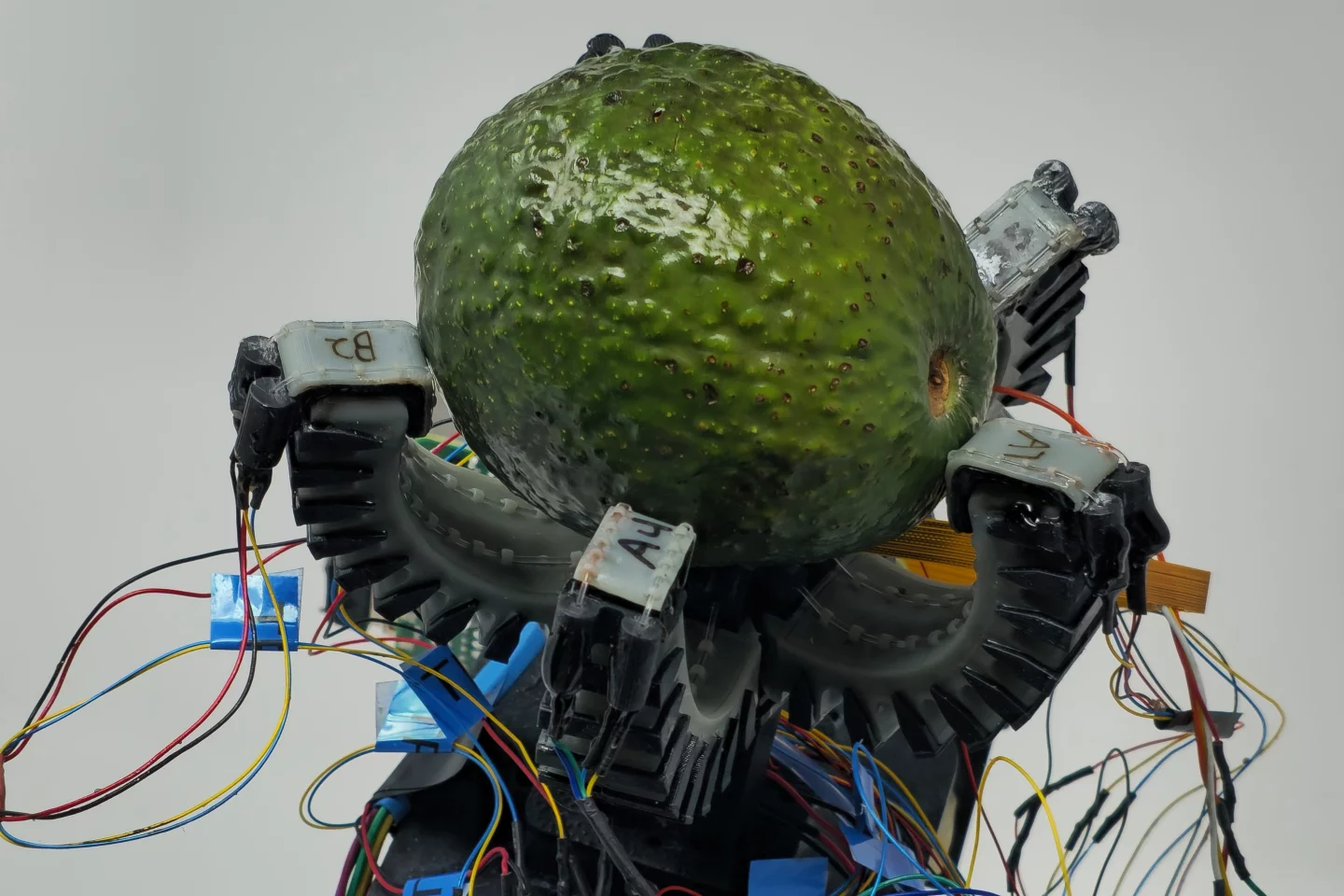
인식 능력 측면에서 이 새로운 로봇 손에는 과일 모양을 시각적으로 판단할 수 있는 소형 카메라가 장착되어 있습니다. 이 기능은 일부 농업용 로봇에 적용되었습니다. 하지만 연구진은 겉모습에만 의존해 숙성 정도를 정확하게 판단하기에는 부족하다고 지적했다. 아보카도를 예로 들면, 살짝 꼬집어서 익은 정도를 감지해야 하는 경우가 많습니다. 로봇이 이러한 "인간의 직관적인" 판단을 학습하도록 하는 방법은 이 연구의 주요 어려움 중 하나입니다.
연구팀은 이 문제를 해결하기 위해 부드러운 손가락 내부에 특수 촉각 센서를 내장해 로봇이 과일을 부드럽게 쥐었을 때 과일을 으깨지 않고도 경도와 탄력성에 대한 물리적 정보를 얻을 수 있도록 했다. 이 센서는 실시간으로 유지 강도를 모니터링할 수도 있습니다. 시스템이 현재 그립이 충분히 단단하지 않다고 판단하면 로봇은 과일이 미끄러지거나 땅에 떨어지는 것을 방지하기 위해 자동으로 힘을 미세 조정합니다.
테스트 단계에서 로봇 손은 높은 인식과 제어 정확도를 보여줬고, 센서는 집은 과일의 모양을 거의 100% 정확도로 예측할 수 있었습니다. 현재 프로토타입 장치는 무게가 65g 미만이고, 한 번 열고 닫는 데 2초 미만이 소요되며, 최대 약 1kg의 물체를 들어올릴 수 있어 실제 농기계 통합을 위한 경량화 및 응답 속도의 기본 조건을 제공한다.
기계, 재료 및 항공우주 공학과의 조교수인 프로젝트 리더인 Anand Mishra는 팀이 향후 2~4년 내에 이 소프트웨어 파악 기술을 글로벌 시장에 선보일 계획이며 현장의 대규모 배치 요구를 충족하기 위해 보다 확장 가능한 파악 장치를 개발하기 위해 노력하고 있다고 말했습니다. 연구원들은 또한 우주 임무에서 이상한 물체 잡기, 수중 환경 탐사, 의료 분야에서 취약한 조직 및 기관의 안전한 작동을 포함하여 더 넓은 범위의 시나리오에서 이 기술의 응용 전망에 대해 낙관하고 있습니다.

소프트웨어 구조, 광섬유 감지 및 비전 시스템을 결합한 로봇 파악 솔루션이 고손실, 고정밀 시나리오를 위한 중요한 기술 경로가 되고 있음을 보여주는 관련 연구 논문이 "Nature Communications" 저널에 게재되었습니다. 연구진은 이러한 소프트 로봇이 점차 상용화 단계로 나아가면서 농장 수확 일선에서 인간의 압력과 과일 및 야채 폐기물의 비율이 크게 향상되어 정밀 농업 및 지능형 농업 기계 개발을 위한 새로운 도구 기반을 제공할 것으로 기대한다고 지적했습니다.