미국 노스롭그루먼(Northrop Grumman)은 궤도붕괴로 인해 대기권에 추락할 위기에 처한 NASA 우주천문대의 궤도 내 '구출'을 수행하기 위해 서비스 로봇 항공기를 탑재한 페가수스 로켓을 발사한다고 최근 발표했다. 이 조치는 상업용 항공우주 추진 장치의 궤도 서비스 및 수명 연장에 있어 새로운 이정표로 간주됩니다.
이 임무의 목표는 2004년 11월부터 운영되어 거의 22년 동안 운영된 Neil Gehrels Swift Gamma-Ray Burst Observatory입니다. 위성은 X선과 자외선/가시광선 대역에서 감마선 폭발과 잔광을 관찰함으로써 고에너지 천체물리학 연구에 많은 양의 핵심 데이터를 제공했습니다. 그러나 이제 다년간의 궤도 감쇠로 인해 대기권 재돌입이라는 피할 수 없는 운명에 직면해 있습니다.

과거 대부분의 경우 이러한 과학위성은 궤도고도가 지속적으로 낮아지고 연료가 고갈되는 등의 문제를 겪게 되면 관련 기관은 결국 대기권에서 불타버리는 것을 받아들일 수밖에 없었고, 여전히 정상적으로 작동할 수 있는 '좋은 위성' 세트는 폐기됐다. 발사체 성능과 우주 로봇 기술의 급속한 발전으로 '복귀 불능'과 유사한 상황이 바뀌기 시작하고 있으며 궤도 상 활성 서비스 및 수명 연장 임무가 점차 개념에서 현실로 옮겨가고 있습니다.
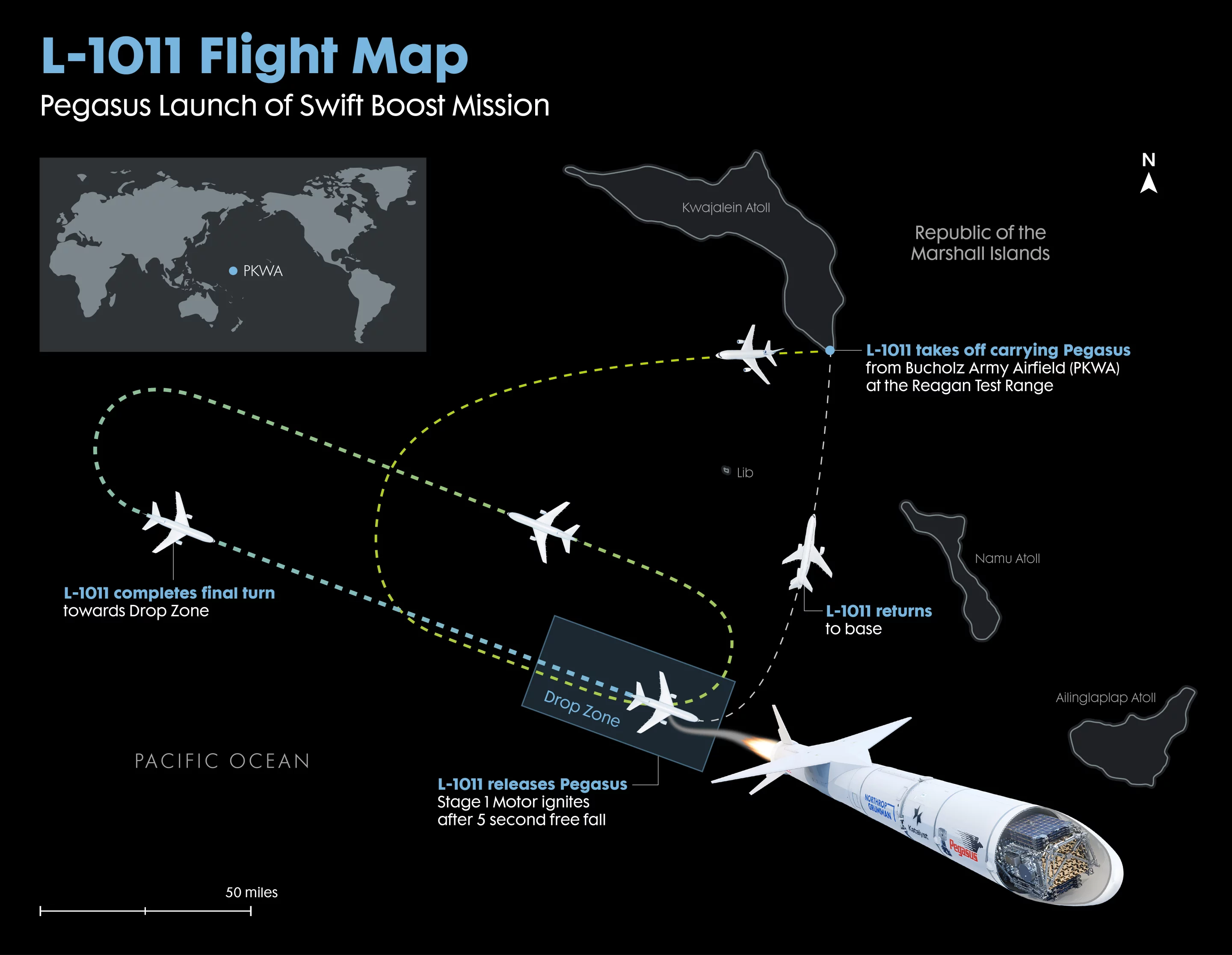
발표된 임무 계획에 따르면 Northrop Grumman은 L-1011 "Samsung" Stargazer 수송 항공기가 공중에서 발사하는 "Pegasus" XL 소형 고체 발사체를 사용할 예정입니다. 로켓 페어링에는 Katalyst Space Technologies가 개발한 약 400kg의 LINK 서비스 차량이 탑재됩니다. 수송기는 마샬 군도의 콰잘레인 환초 근처 적도 해역 상공으로 로켓을 발사할 예정이다. 페가수스가 점화된 후 LINK는 궤도 경사가 약 20.6도인 Swift와 거의 동일한 궤도 평면으로 보내집니다.


로켓의 상부 단계에서 분리된 후 LINK는 자체 추진 시스템을 사용하여 궤도를 점진적으로 조정하고 시속 약 17,000마일(시속 약 27,000km)의 상대 속도로 궤도 랑데뷰를 완료할 때까지 며칠 또는 몇 주에 걸쳐 목표 위성을 추적합니다. 작업은 간단하고 간단해 보이지만 기술적 과제는 매우 높습니다. 측정 및 제어 링크 신호의 왕복 지연으로 인해 구조 항공기는 중요한 단계에서 자율 제어에 크게 의존해야 하며 광학 카메라 및 LiDAR 거리 측정 센서의 관측 데이터를 실시간으로 처리하고 탑재된 유도 비행 소프트웨어 및 이미징 시스템을 사용하여 상대 항법 및 자세 제어 결정을 완료해야 합니다.


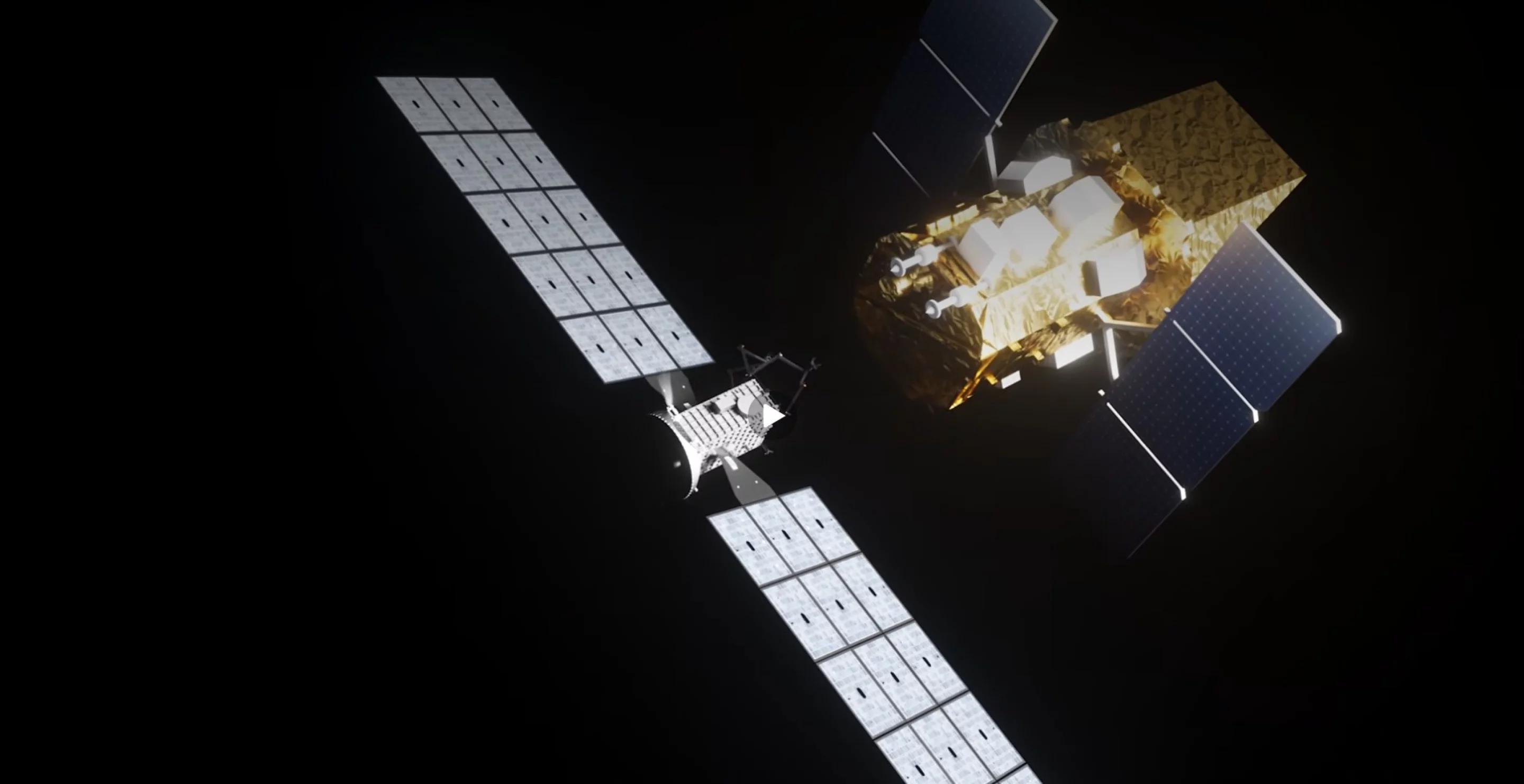
더욱 문제가 되는 점은 Swift 위성이 외부 유지 관리나 도킹 인터페이스를 염두에 두고 설계되지 않았다는 것입니다. 표준화된 도킹 링도 없고 자기 포착 장치나 협동 항법 비콘도 없습니다. 거의 20년 동안 우주 환경에 노출된 후에도 구조와 표면 상태에 대한 전례가 없습니다. 따라서 LINK는 먼저 근거리에서 대상 위성을 스캔하고 평가하여 "델타" 로켓의 지상 운송 및 설치에 사용되는 지상 리프팅 고정 지점을 찾고 이에 따라 캡처 전략을 계획해야 합니다.
적합한 구조 부품이 발견되고 안전한 것으로 확인되면 LINK는 세 개의 "무서운" 기계 팔을 확장하여 이러한 지상 고정 장치를 단단히 파악함으로써 Swift의 자세와 궤도 제어권을 인수하게 됩니다. 그런 다음 LINK는 자체 추진 시스템을 통해 점화되어 천문대를 약 600km 고도의 새로운 궤도로 밀어 올려 다시 한 번 "수년"의 안전한 궤도 수명을 확보하고 후속 고에너지 천문 관측을 위한 귀중한 시간을 확보할 수 있습니다.
계획대로 임무가 완수된다면 상업용 항공기가 궤도상 서비스용으로 예약되지 않은 미국 정부 위성을 성공적으로 포착하는 것은 처음이다. 또한 완전히 "준비되지 않은" 상태에서 과학 위성을 포착하고 궤도를 도는 시도는 세계 최초가 될 것입니다. 상업용 항공우주 산업의 경우 이는 궤도상 구조, 수명 연장, 궤도 청소와 같은 서비스가 구상 및 테스트 단계에서 대규모 운영 단계로 이동하고 있으며 해당 서비스의 잠재적 시장 가치를 과소평가할 수 없음을 의미합니다.
구조 발사는 현재 2026년 6월 말로 계획되어 있다. Northrop Grumman의 Pegasus 로켓 수석 엔지니어인 Steve Hollo는 Pegasus가 수년 동안 과학 위성을 발사하는 임무를 맡아 왔으며 Kwajalein Atoll에서 이륙하는 이 신속한 대응 임무는 신속한 조립, 테스트 및 글로벌 이동 배치에서 로켓의 능력을 완벽하게 보여주었다고 말했습니다. 최신 임무는 또한 전체 전자 장비 세트를 포괄적으로 업그레이드하여 기존 기술 축적을 계승하면서 현대화했습니다. 그는 페가수스가 단일 지상 발사 장소에 고정되어 있지 않기 때문에 다른 발사체에 비해 유연성과 응답 속도에서 비교할 수 없는 이점을 제공하고 시간에 민감한 위성 구조 작전에 핵심 지원을 제공한다고 강조했습니다.