한동안 우리는 에너지를 소비하지 않고도 두 가지 상태를 유지할 수 있는 "쌍안정" 장치에 대해 들어왔습니다. 쌍안정 장치는 두 가지 안정 상태 사이를 전환할 수 있는 인장 장치이지만 두 상태를 유지하기 위해 전기가 필요하지 않습니다. 식물 씨앗 꼬투리에서 영감을 받은 새로운 장치는 견고하고 활성화하기 쉬운 로봇 그리퍼 형태를 취합니다.
금속 머리핀은 접촉을 통해 물건을 잡을 수 있는 일상적인 물건의 좋은 예입니다. 이러한 항목의 경우 일반적으로 잡기 동작을 트리거하기 위해 많은 압력을 가하는 것을 원하지 않습니다. 이는 그래버의 "에너지 장벽"이 낮기를 원한다는 의미입니다.
문제는 에너지 장벽이 낮은 쌍안정 장치는 잡는 물체를 잡을 만큼 충분한 전력을 갖지 못하는 경우가 많다는 것입니다. 즉, 무거운 물체나 외력에 의해 끌려가는 물체에 대한 통제력을 상실할 가능성이 높습니다.
우리에게 필요한 것은 처음에 물체를 잡을 때 에너지 장벽이 낮지만 일단 물체를 잡으면 에너지 장벽이 증가하는 그래버입니다. 물체를 놓아야 할 때가 되면 에너지 장벽이 다시 낮아집니다.
이러한 요구 사항을 염두에 두고 중국 과학자 팀은 조바심의 쌍안정 종자 꼬투리를 연구했습니다.

꼬투리의 씨앗이 미성숙하여 분산될 수 없는 한 꼬투리는 높은 에너지 장벽을 유지하여 발동을 어렵게 만듭니다. 그러나 일단 씨앗이 성숙하면 이 에너지 장벽은 약해집니다. 따라서 빗방울의 압력만으로도 꼬투리가 주변 토양에 씨앗을 뿌릴 수 있습니다.
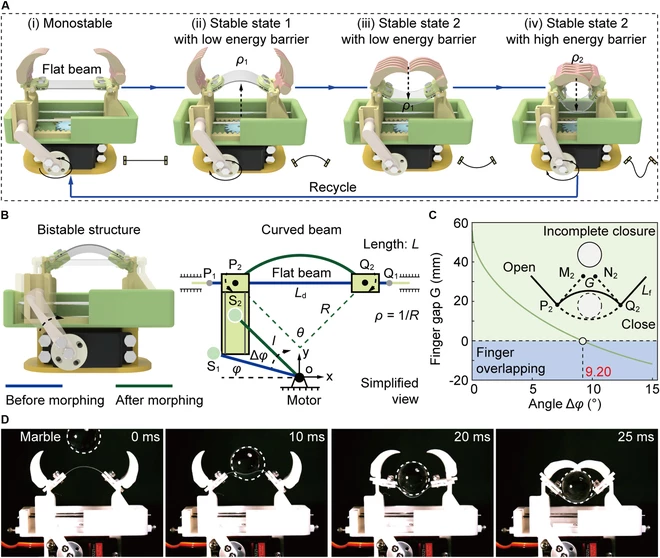
생체공학 쌍안정 그리퍼의 개략도
중국 Sun Yat-sen University의 Yang Jinzhao 박사, Sun Yat-sen University의 Wu Jianing 박사, Dalian University of Technology의 Peng Haijun 박사
봉선화 꼬투리에서 영감을 받은 그리퍼는 두 개의 잡는 "손가락"으로 구성되어 있으며 그 베이스는 신축성 있는 빔의 양쪽 끝에 연결되어 있습니다. 핑거를 빔에 연결하는 두 개의 클램프는 각각 모터로 구동되는 회전 샤프트에 연결됩니다.
홀더의 기본 중립 상태에서 빔은 편평하고 장력이 없습니다. 그러나 물체를 잡아야 할 경우 샤프트가 회전하여 빔이 약간 위쪽으로 구부러집니다. 이로 인해 에너지 장벽이 낮은 장력 하에서 쌍안정 상태가 됩니다.
따라서 그리퍼가 물체 주위에 배치되고 해당 물체가 상향 곡선 빔을 누르면 빔이 하향 곡선 방향으로 튀어 오르는 동시에 손가락을 물체쪽으로 당깁니다.
이런 일이 발생하면 샤프트가 반대 방향으로 회전하여 빔이 아래쪽으로 더 구부러집니다. 이로 인해 에너지 장벽이 증가하여 그리퍼가 항목을 잡는 능력이 강화되고 고정됩니다.
이 기술 시연에서는 그리퍼 중 하나가 쿼드콥터 드론 위에 장착되어 드론이 제자리에 머물지 않고도 나뭇가지, 난간 및 기타 물체에 매달릴 수 있었습니다. 빔 모터는 빔 장력을 조정할 때 약간의 전력을 소비하지만 물체를 잡는 데는 전력이 필요하지 않습니다. 이는 기존 그리퍼에서는 발생하지 않습니다.

연구에 사용되는 드론
Sun Yat-sen 대학의 Jianing Wu 박사는 "우리의 로봇 그리퍼는 빠른 응답 속도, 프로그래밍 가능한 상호 작용력, 간단하고 효율적인 디자인을 갖추고 있어 차세대 로봇 시스템을 위한 새로운 길을 열었습니다"라고 말했습니다. Wu 박사는 Dalian University of Technology의 Peng Haijun 박사와 함께 프로젝트를 공동 주도했습니다. "이 독특한 메커니즘은 로봇의 성능을 크게 확장하여 다양한 분야에서 사용할 수 있게 해줍니다."
이번 연구에 관한 논문은 최근 Research 저널에 게재되었습니다.