우리는 수년에 걸쳐 다양한 로봇 소금쟁이를 보아왔지만 과학자들은 여전히 이 곤충에 대한 새로운 독창성을 발견하고 복제하고 있습니다. 예를 들어, 최근 연구자들은 발에 달린 부채를 이용해 물 위를 빠르게 이동할 수 있는 소금쟁이 로봇을 발명했습니다.

길이가 3mm에 불과한 Rhagovelia 소금쟁이는 정말 특별합니다. 두 개의 긴 중간 다리(추진에 사용됨)는 물에 닿으면 펼쳐지는 깃털 같은 부속물로 끝납니다. 그들이 앞으로 노를 저을 때, 이 수중 부속기관은 개구리 발가락 사이의 거미줄처럼 물 표면을 들어올려 곤충을 빠르게 앞으로 나아가게 합니다.
스트로크가 끝나면 부채 모양의 촉수가 물 밖으로 당겨지고, 젖은 촉수는 갓 담근 붓의 강모처럼 한 점으로 모입니다. 이렇게 하면 다음 스트로크를 준비하기 위해 다리가 앞으로 흔들릴 때 촉수가 더욱 유선형적인 모양이 됩니다.

부채꼴 Rhagovelia 소금쟁이 - 이 사진에서 부채꼴과 발톱은 아래쪽을 향하고 있으며 거울처럼 물에 반사됩니다.
이러한 부채 모양 구조 덕분에 곤충은 초당 몸 길이의 약 120배의 속도로 물을 가로질러 빠르게 이동할 수 있습니다. 게다가 물을 흡수하는 부채꼴 구조를 수면 한쪽에 배치하기만 하면 소금쟁이는 약 50밀리초 만에 90도 회전을 완료할 수 있습니다.
이 아이디어를 바탕으로 캘리포니아대학교, 버클리캠퍼스, 한국 아주대학교, 조지아 공과대학의 과학자들은 라고벨리아를 더 깊이 연구하기로 결정했습니다.
아주대학교 고제성 교수와 박사후 연구원 김동진은 전자현미경을 사용하여 각각의 부채꼴 모양의 개별 필라멘트가 평평하고 유연한 리본 모양의 중앙 스트립으로 구성되어 있으며 양쪽에 작은 미늘이 뻗어 있어 마치 깃털과 같다는 사실을 발견했습니다. 이 디자인을 통해 부채꼴 모양의 부속물이 수중에서 펼쳐지므로 노처럼 사용할 수 있습니다.
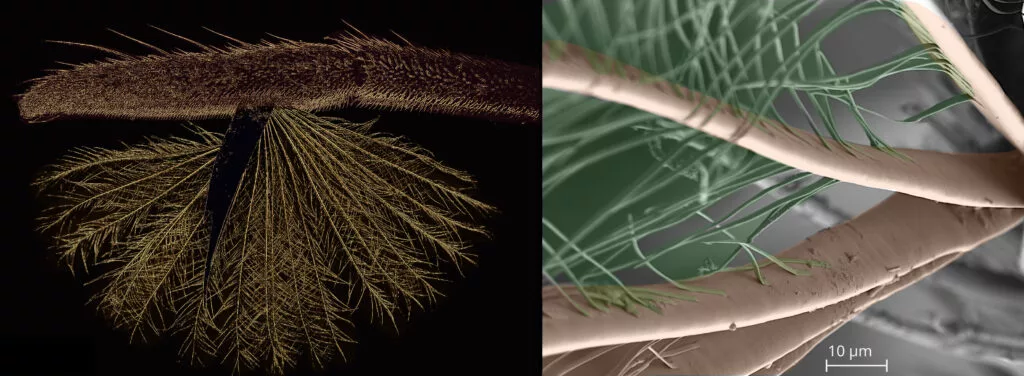
왼쪽에는 Rhagovelia의 패들링하는 두 다리 끝에 있는 부채와 발톱의 사진이 있고, 오른쪽에는 부채의 미늘과 부채를 구성하는 작은 미늘(녹색)의 평평한 리본 모양 미세 구조를 보여주는 부채의 컬러 주사 전자 현미경 이미지가 있습니다.
과학자들은 또한 물의 표면 장력이 이러한 실을 펼치는 데 필요한 모든 탄성력을 제공한다는 사실을 발견했습니다. 이전에는 이러한 전개 동작이 근육에 의해 구동되는 것으로 생각되었습니다. 뇌졸중 중에는 이 실을 긴장 상태로 유지하기 위해 약간의 근력이 사용되지만 실을 펼치는 데 근력이 필요하지는 않습니다.
이러한 발견을 바탕으로 팀은 Rhagobot이라는 곤충의 로봇 버전을 만들었습니다. 길이 8cm, 너비 10cm, 높이 1.5cm(3.1 x 3.9 x 0.6인치)로 이름보다 확실히 더 큽니다. 두 개의 가운데 다리 각각의 끝에는 10 x 5mm 크기의 평평한 리본 모양의 미세 구조가 있는 1mg Rhagovelia 모양의 부채꼴 구조가 있습니다.

반수생 로봇 Rhagobot(왼쪽)이 물에 노출되면 켜지는 생체 공학 팬 옆에 있습니다.
전체 로봇은 외부 전원에 유선으로 연결되어 있으며 무게는 1/5그램에 불과합니다. 현재는 초당 두 몸 길이의 거리로 물을 가로질러 빠르게 이동할 수 있으며 0.5초 이내에 90도 회전을 완료할 수 있습니다. Rhagobot의 후손은 수색, 구조 또는 환경 모니터링과 같은 응용 분야에서 더 빠르고 유연해질 것으로 기대됩니다.
"우리의 로봇 팬은 생물학적 팬과 마찬가지로 수력과 유연한 기하학적 구조만을 사용하여 자체 변형이 가능합니다"라고 조지아 공대 Saad Bumrah 교수와 함께 연구의 수석 공동 저자인 Gao가 말했습니다. "이것은 수백만 년의 진화를 거쳐 자연에 의해 정제된 일종의 기계적 임베디드 지능입니다. 소형 로봇 분야에서 이 효율적이고 독특한 메커니즘은 기존 로봇 소형화의 한계를 극복하는 핵심 기술이 될 것입니다."
이 연구는 캘리포니아 대학교 버클리 캠퍼스의 조교수인 오르테가-히메네스(Ortega-Jiménez)가 주도했으며 그의 논문은 최근 사이언스(Science) 저널에 게재되었습니다. 아래 비디오에서 Rhagobot의 작동 모습을 볼 수 있습니다.
출처: 캘리포니아 대학교, 버클리, 조지아 공과대학