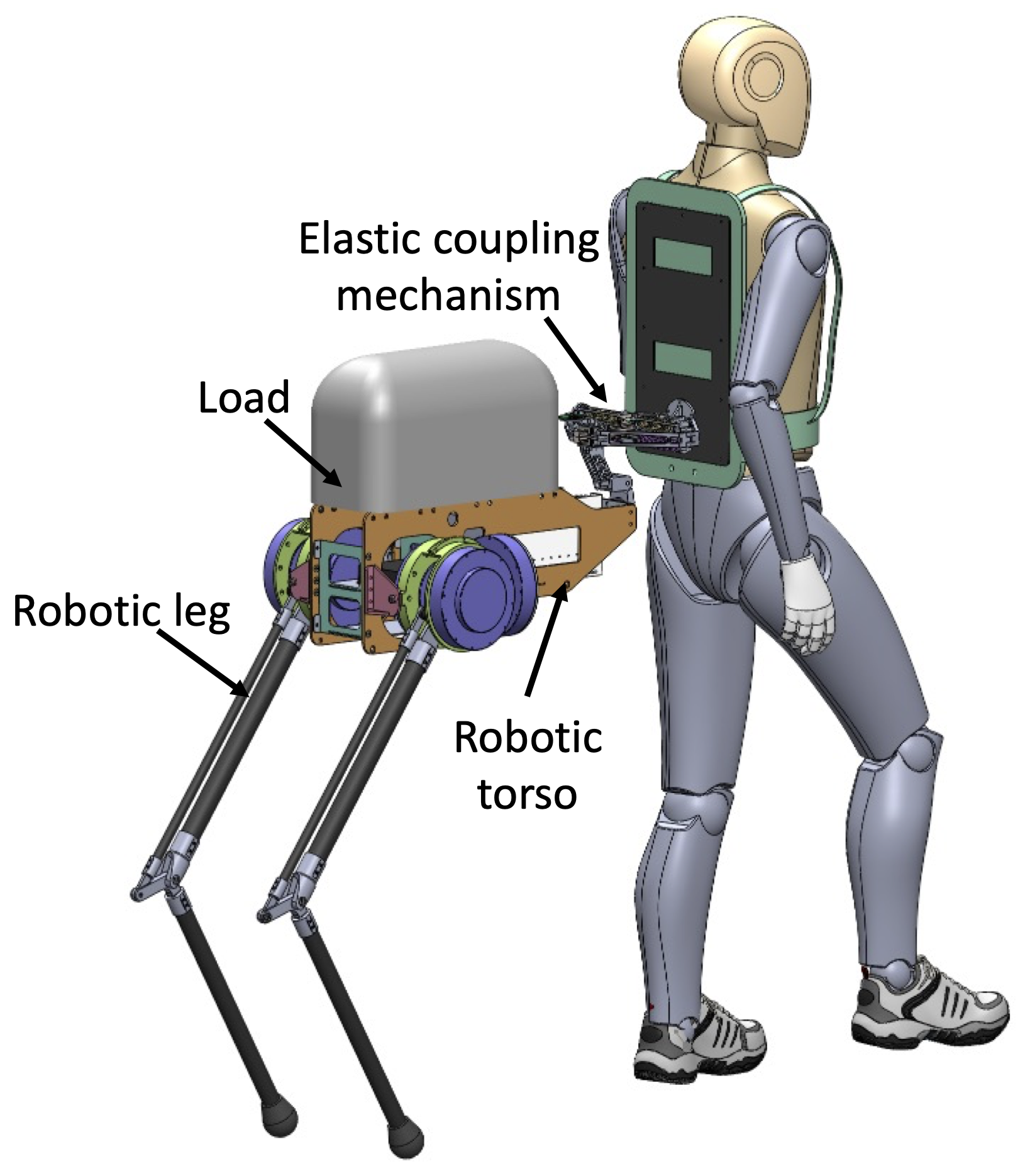
Southern Science and Technology 대학의 Fu Chenglong 교수 팀은 원래 착용 가능한 켄타우로스 체중 부하 보행 로봇을 개발했습니다. 해당 결과는 로봇공학 분야 권위 있는 저널에 게재됐다. 전통적인 외골격 로봇은 보조 효율이 낮고 인간의 대사율을 약 10%만 줄일 수 있습니다.켄타우로스 로봇은 전통적인 디자인을 깨고 네 발 달린 동물의 하중을 견디는 형태에서 영감을 얻었습니다. 독립적인 팔다리로서 착용 가능한 탄성 결합 인터페이스를 통해 인간의 등과 연결되어 인간-기계 하이브리드 4족 보행 시스템을 구축합니다.
로봇에는 비선형 강성 특성을 갖고 동력 보조 및 균형의 동적 분리를 실현하는 완화된 탄성 결합 메커니즘이 장착되어 있습니다. 걷기-상호작용 협업 제어 프레임워크와 결합되어인체의 움직임 의도를 실시간으로 감지하고, 수동 지시 없이 모든 방향을 높은 정밀도로 따라가는 동시에 안정적인 수평 추력을 출력할 수 있습니다.
실험적 검증을 통해 로봇의 성능이 뛰어난 것으로 나타났습니다. 기동성 측면에서는 1미터의 좁은 공간에서 파일을 중심으로 '8'자 원을 완성할 수 있으며, 계단, 경사면 등 복잡한 노면도 원활하게 통과할 수 있습니다.
체중부하 성능 측면에서 보면,20kg의 무게를 들 때 인체의 순 대사 비용은 35% 감소하고, 발바닥에 가해지는 압력은 52% 감소합니다., 안정성과 무부하 보행 사이에는 큰 차이가 없습니다.
이 로봇은 긴급 구조, 현장 탐사, 복잡한 지형 물류 지원 및 기타 시나리오에 적합하며 향후 인체의 생리적 한계를 돌파할 것으로 예상됩니다.